#CienciaYTecnologia •
El aterrizaje de un pájaro en una rama hace que la maniobra parezca la cosa más fácil del mundo, pero en realidad, el acto de dejar de volar para posarse sobre una superficie tan pequeña sin caerse de ella implica una sincronización extremadamente precisa de movimientos corporales. Es una maniobra tan compleja que ningún avión de alas batientes (ornitóptero) robótico ha sido capaz de ejecutarla, hasta ahora.
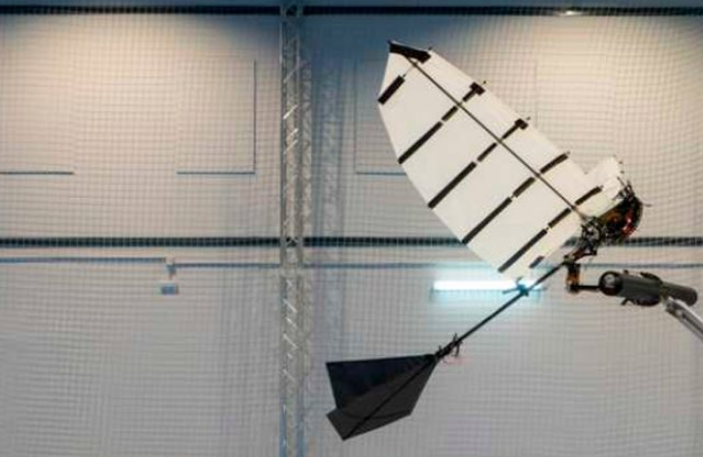
El equipo de Raphael Zufferey, de la Escuela Politécnica Federal de Lausana (EPFL) en Suiza, en el que también han participado científicos de la Universidad de Sevilla en España, ha ideado un sistema robótico de aterrizaje que hace posible emular esa habilidad de los pájaros. El equipo construyó y probó un robot que vuela batiendo las alas y que además es capaz de aterrizar sin caerse en una rama de árbol, en una percha o en superficies minúsculas comparables.
El ornitóptero robótico pesa tan solo 700 gramos.
Los problemas de ingeniería que planteaba el aterrizaje de un ornitóptero robótico en una percha sin depender de instrucciones externas específicas exigían manejar muchos factores de un modo que la naturaleza ya ha conseguido hacer a la perfección. El ornitóptero tenía que ser capaz de reducir considerablemente su velocidad de vuelo mientras se posaba, pero sin dejar de volar hasta el instante final. La garra tenía que ser lo bastante fuerte como para sujetar al robot a la percha y soportar su peso del robot, pero al mismo tiempo sin ser tan pesada que el vuelo del robot se viera comprometido. «Esa es una de las razones por las que optamos por una sola garra en vez de dos», señala Zufferey. Por último, el robot debía ser capaz de percibir su entorno y la percha que tenía delante en relación con su propia posición, velocidad y trayectoria.
Los investigadores consiguieron todo esto equipando al ornitóptero con un ordenador de a bordo y un sistema de navegación, complementados con un sistema externo de captura de movimiento para ayudarle a determinar su posición. El apéndice pata-garra del ornitóptero se calibró con precisión para compensar las oscilaciones verticales del vuelo mientras intentaba agarrarse a la percha. La garra se diseñó para absorber el impulso del robot en el momento del impacto y cerrarse rápida y firmemente para soportar su peso. Una vez posado, el robot permanece sujeto en la percha sin gastar energía.
Ahora falta perfeccionar el robot para darle plena autonomía de acción y hacerlo capaz de decidir por su cuenta en qué rama, percha o estructura análoga posarse determinando que son aptas para el aterrizaje.
La habilidad de aterrizar en una rama de árbol o cualquier estructura por el estilo podría facilitarles a los ornitópteros robóticos, cuyas baterías tienen una autonomía limitada como las de muchos otros drones, el poder recargarse mediante energía solar en un sitio lo bastante alto como que la luz solar incida directamente y que al mismo tiempo esté libre de obstáculos a la hora de despegar. Esto sería una gran ayuda para permitirles llevar a cabo misiones de largo alcance y duración.
Zufferey y sus colegas exponen los detalles técnicos de su avance en la revista académica Nature Communications, bajo el título “How ornithopters can perch autonomously on a branch”.
noticiasdelaciencia.com